👋 Hello there, I’m Steven
🧑💻 I’m a Ph.D. student from Texas A&M University
🤖 My research direction is Robotics and AI (focused on Computer Vision) solutions for precision poultry and livestock farming.
✉️ You can find me here:
Email: ziyuanzhao@tamu.edu
LinkedIn: Homepage
📖 Educations
- Aug 2024 – Present. Texas A&M University, College Station, TX, USA
- Ph.D. in Poultry Science (Robotics Track)
- Graduate Certificate in Entrepreneurship
- Aug 2020 - Apr 2024. University of Detroit Mercy, Detroit, MI, USA
- B.E. in Robotics Engineering
📝 Publications
Ziyuan Zhao, Yu Wang, Emmanuel Otchere, Morgan Farnell, Gregory Archer, Giridhar Athrey, Kiju Lee, Ziteng Xu*
- In Preparation
Ziyuan Zhao, Yu Wang, Jill Domel, Ziteng Xu*
- Under Review
Yu Wang, Siya Chen, Ziyuan Zhao, Roland Alaniz, Morgan Farnell, Giridhar Athrey, Gregory Archer, Samson Oladokun, Sushil Paudyal, Kiju Lee, Ziteng Xu*
- Under Review
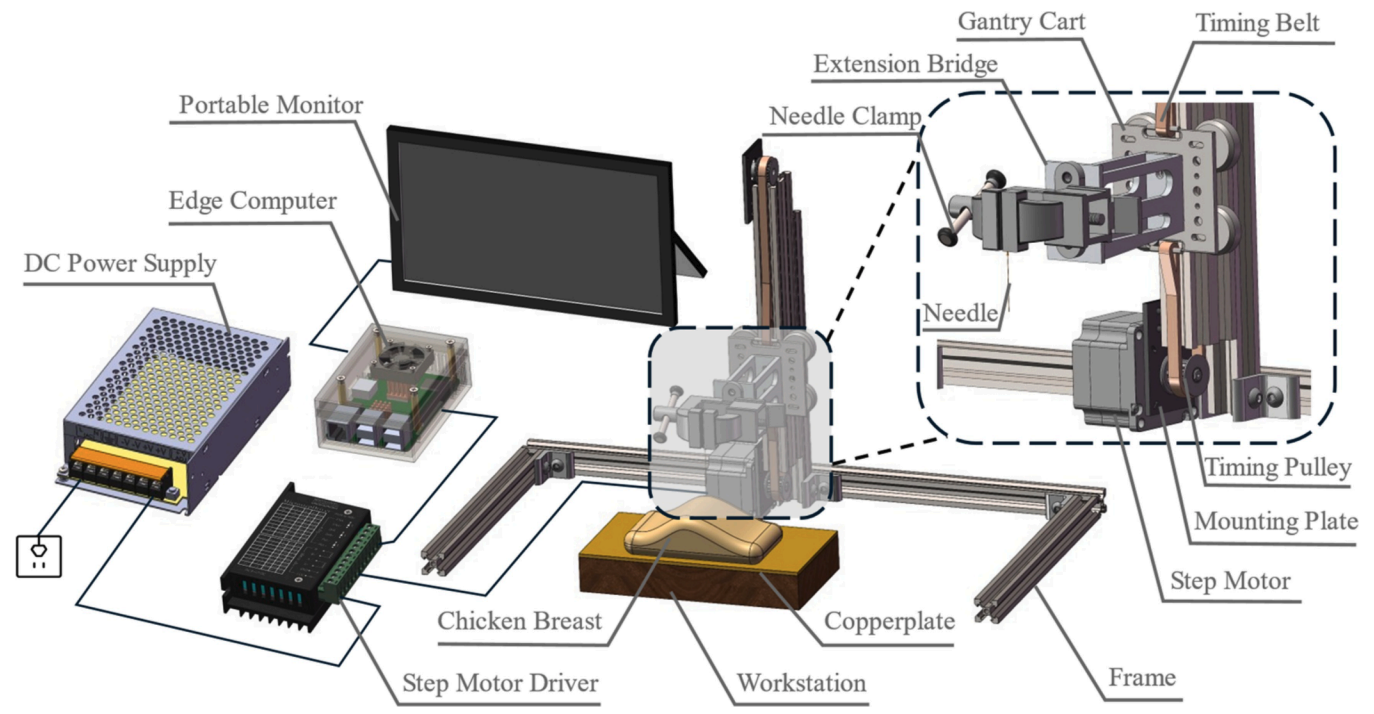
Differentiate Moderate Woody Breast from Normal Chicken Breast Using Monofilament Needles
Ziyuan Zhao, Yu Wang, Charles Villegas, Morgan Farnell, Gregory Archer, Giridhar Athrey, Kiju Lee, Dan Feng*, Ziteng Xu*
- In this study, we bridge mechanical beam buckling theory and poultry meat quality evaluation by introducing a monofilament needle-based approach with high accuracy.
Intelligent Warehouse Robot for Classifying, Sorting, and Transporting Goods’ Boxes
Ziyuan Zhao, Amna Mazen, Youssef Bazzi*, Bingyi Wang, Sushuang Li
- This paper presents an integrated intelligent warehouse robot system that combines computer vision, robotic manipulation, and autonomous navigation to perform box classification, sorting, and transportation. Using YOLOv5 and a Kinect camera, the system classifies boxes by size, while a WidowX robotic arm handles pick-and-place operations and a Pioneer P3-DX mobile robot with LiDAR navigates to designated storage areas. Experimental results in a simulated warehouse demonstrate reliable detection, obstacle avoidance, and precise placement, showing the system’s potential to improve warehouse efficiency and automation.
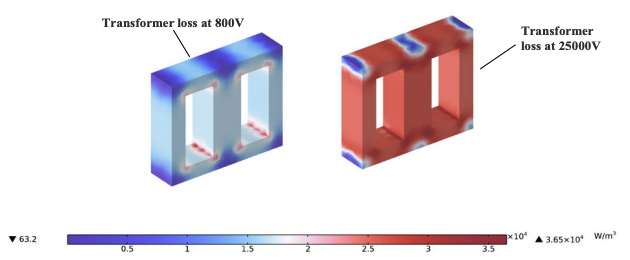
Xianwei Guo, Zhetao Huang, Ziyuan Zhao*
- This paper investigates the spatial electromagnetic field distribution of a transformer core considering the nonlinear B-H curve using a COMSOL-based E-type transformer model. The results show that magnetic saturation causes strong nonlinear field concentration in the central core, leading to excessive losses, current distortion, and rapid output current reduction, which may damage the transformer.
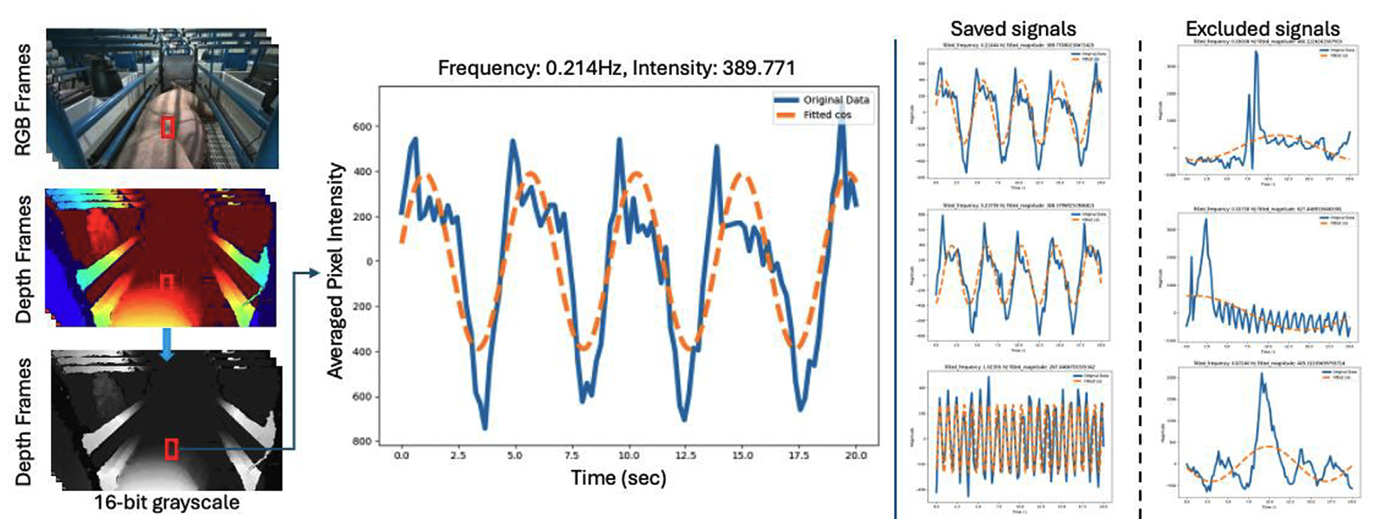
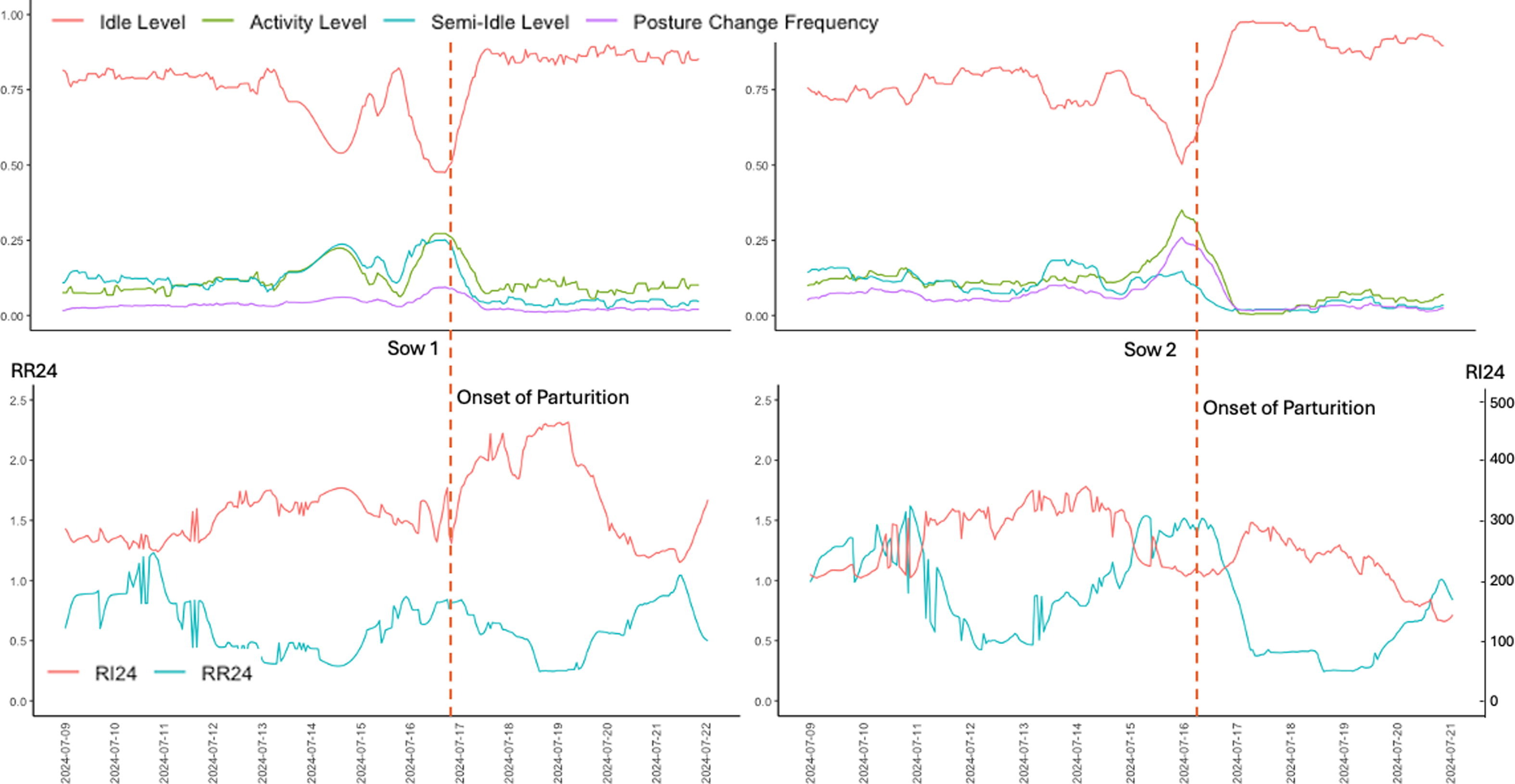
Yu Wang, Siya Chen, Ziyuan Zhao, Jianfeng Zhou, Timothy Safranski, Jeffrey Wiegert, Ziteng Xu*
- Monitoring sow’s respiratory rate (RR) is important for predicting the onset of parturition. This study proposes a non-contact method for RR monitoring in lateral lying (LL) sows using depth camera. The pipeline is composed of several deep-learning modules. A posture recognition model was trained to identify lateral lying sows. RR is evaluated based on the changes in average pixel intensity of the grayscale depth video within a fixed bounding box near the sow’s abdomen region. Two sows were evaluated in this study. Noticeable increases in daily activity level and respiratory rate were observed before the onset of parturition.
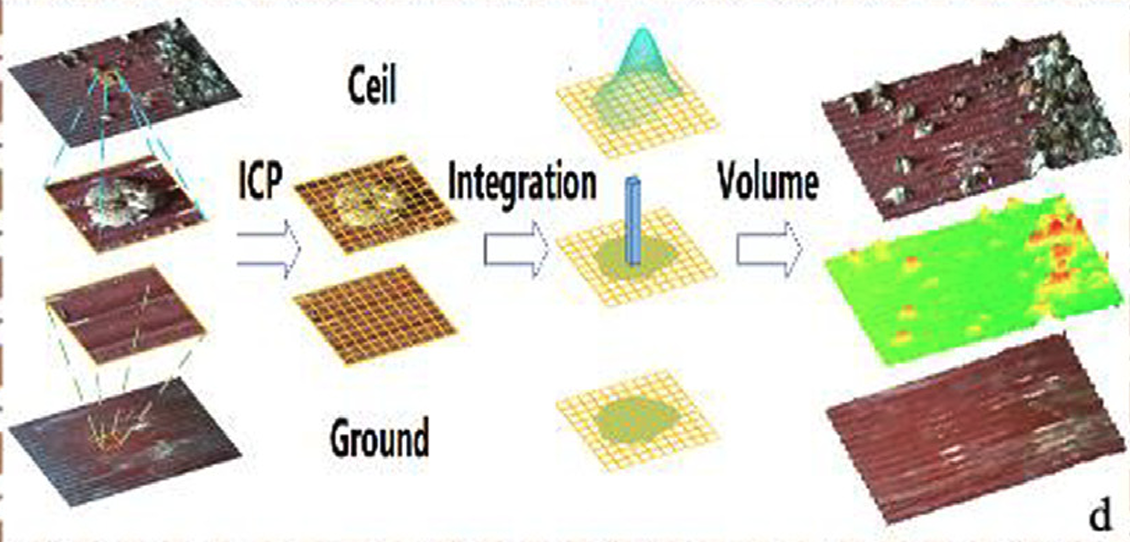
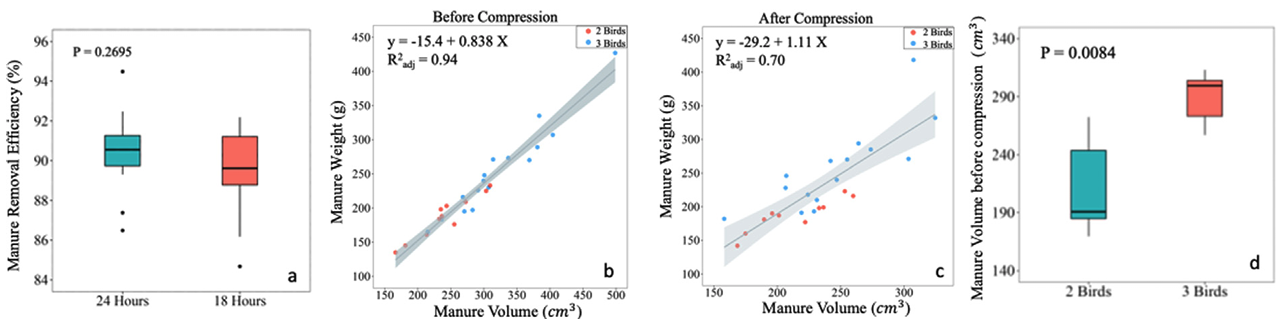
Investigation of poultry manure removal efficiency and volume estimation on grooved-floor panels
Siya Chen, Yu Wang, Ziyuan Zhao, Dan Feng, Gregory Archer, Giridhar Athrey, Ziteng Xu*
- A mobile platform equipped with an electric cylindrical brush was developed to evaluate the efficiency of manure removal from grooved f loor panels designed for free-range broiler production. The panels were placed beneath 20-week-old caged layers to collect manure samples. An Intel L515 LiDAR camera was used to measure manure volume before and after compression. Cleaning efficiency was assessed under various load conditions, and the relationship between manure weight and volume was analyzed. The results demonstrated that manure can be effectively removed and manure weight can be accurately estimated, which offers a potential method for determining the number of live birds per cage in caged systems.
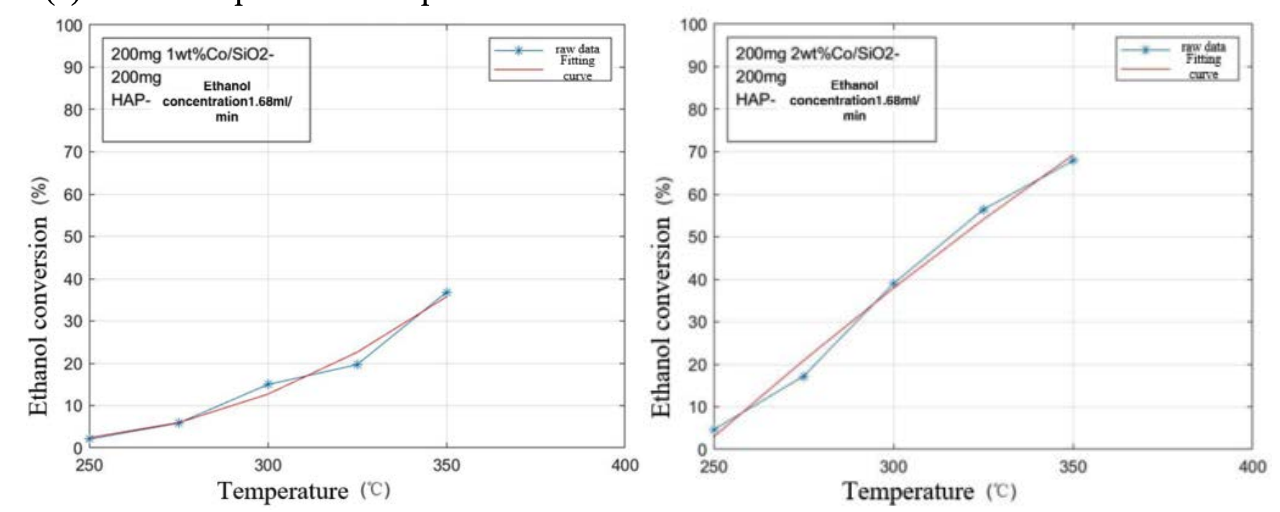
Ziyuan Zhao*, Shougan Ye
- This paper studies ethanol-to-C4 olefin preparation by analyzing the effects of catalyst combinations and temperature on conversion and selectivity. Linear and nonlinear regression models solved with MATLAB and SPSS reveal functional relationships, enabling trend prediction and offering insights for catalyst-driven chemical processes.
💻 Internship Experiences

- May 2024 - Aug 2024, Ford(Global Headquarters), Dearborn, MI, USA
Research Engineer Intern (Control Algorithm Focus) - Developed next-generation active suspension system for vehicles, including the F-150 and Lincoln
- Built 1/4 car, half-car, and full-car models in MATLAB to support control algorithm development.
- Designed and implemented multi-input PID and LQR controllers to regulate longitudinal acceleration, pitch angle, and roll angle. Achieved significant performance improvements: 77% reduction in RMS longitudinal acceleration, 69% reduction in pitch angle RMS, and 58% reduction in roll angle RMS.
- Maintained energy consumption under 2 kW and preliminarily reduced per-vehicle implementation cost to under $4,000.
- May 2023 - Aug 2023, Chinese Academy of Science, Shenzhen, Guangdong, CN
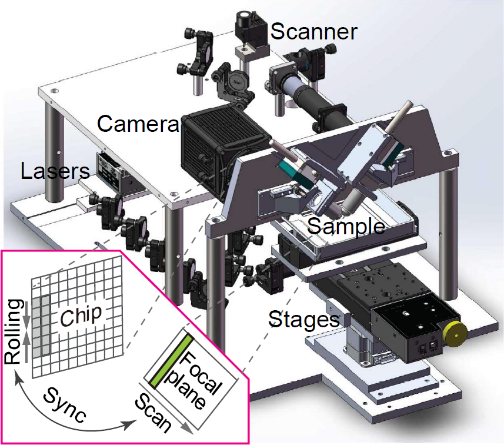
Automation Engineer Intern - Design and Implementation of High-Throughput Imaging System
- Redesigned the fixed base of the VISoR system into a rotating base, significantly reducing the manual labor and time costs associated with brain imaging.
- TM4C-Based Fully Automated Liquid Exchange System for Mouse and Monkey Brain Experiments
- Engineered a specialized hardware setup incorporating TM4C microcontrollers to facilitate seamless fluid exchange. And programmed TM4C units to orchestrate the precise timing control of liquid exchanges, which ensures consistent and accurate experimental conditions.
- Developed an intuitive user interface to facilitate researchers in setting up experiments, defining parameters, and monitoring progress.
-
Jan 2021 - Feb 2021, Nanyang Technological University Singapore, Singapore AI Intern
-
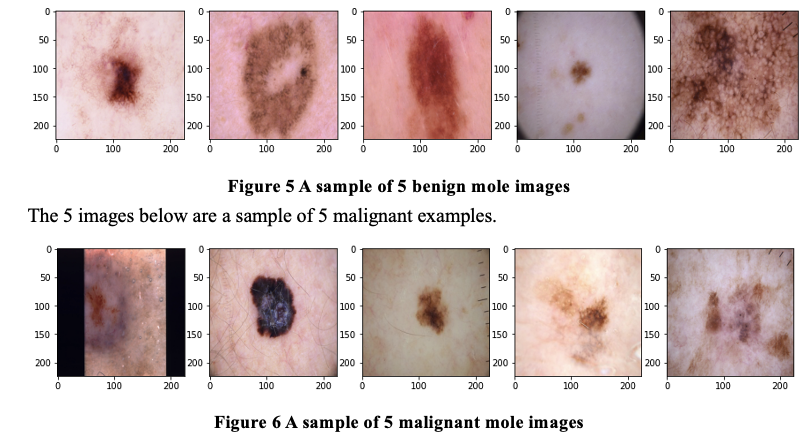
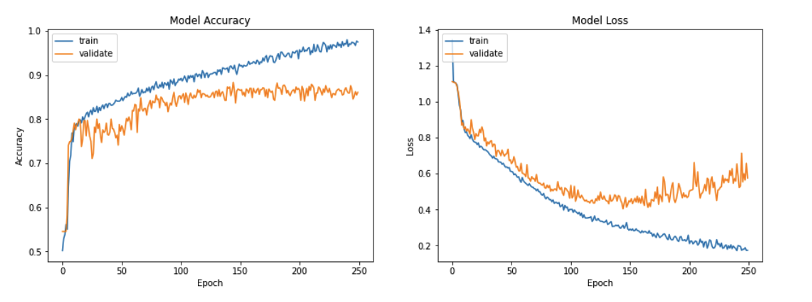
Participated in several AI projects, focusing on developing and optimizing a skin cancer classification model. Using convolutional neural networks (CNN) and WEKA tools, I processed and classified 1800 benign and 1497 malignant skin cancer images from the ISIC Archive dataset on Kaggle. Through multiple model experiments, we achieved an 86% classification accuracy.
-
Main tasks included data preprocessing, model configuration, and data augmentation. By converting images into 224x224 pixel RGB format and performing data augmentation operations such as horizontal flipping and vertical shifting, I significantly improved model accuracy. We experimented with configurations ranging from 1 to 5 convolutional layers and resolved overfitting issues by adding Dropout layers and L2 regularization.
-
🚀 Selected Projects

- PoultryTrack
- PoultryTrack is a purpose-built cloud research platform that transforms how poultry scientists capture, share, and interpret experimental data — replacing fragmented spreadsheets and paper logs with a unified, real-time system. Designed at Texas A&M University, the platform streamlines the entire research lifecycle: from experiment setup and structured daily inspections to advanced welfare assessment and automated cross-experiment analytics, including mortality trends, welfare scoring, and Feed Conversion Ratio (FCR) computation. PoultryTrack is built on a modern React and Supabase architecture with row-level security and TAMU-restricted access. It delivers institutional-grade data integrity, seamless multi-device synchronization, and flexible private or public sharing so that researchers can focus on discovery rather than data wrangling.
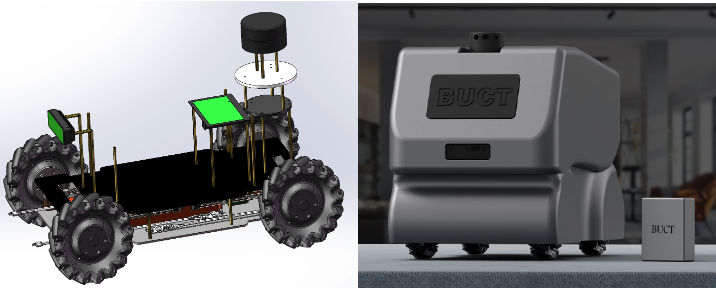
- An Indoor Office Environment-based Delivery Vehicle
- National First Prize of College Students’ Innovation Competition.
- Aimed to design an intelligent distribution car involving the Internet of Things, intelligent hardware, and logistics transportation technology. And took on the responsibilities of mechanical structure modeling and physical fabrication, as well as implementing wireless charging solutions and multi-sensor fusion.

- INav-SLAM: Intelligent Navigation and Mapping Robot
- Utilizes SLAM algorithms (Cartographer, Gmapping) for real-time mapping and localization in unknown environments.
- Employs global path planners (Dijkstra, A*) with the Dynamic Window Approach (DWA) local planner to generate smooth and feasible navigation paths.
- LiDAR-based obstacle detection ensures real-time dynamic avoidance, enabling safe and efficient autonomous navigation in complex indoor spaces.
- Robot Path Planning Based on ROS
- Developed and implemented advanced algorithms for four-wheeled robot obstacle avoidance, automatic reset, and object tracking, which had been implemented using MATLAB.
- Created multiple map models in Gazebo and simulated algorithms written in MATLAB within ROS. Displayed real-time sensor data from the robots through RViz.
- Industrial Robotic Arm Control
- Developed and implemented control programs for a FANUC robotic arm to accomplish diverse tasks, such as simulating dice-throwing experiments, constructing structures with building blocks, and integrating machine vision for playing chess against human or computer opponents.
- These projects demonstrated the robot’s capability in precise motion planning, object manipulation, and vision-based decision-making.
- ROS-Controlled Robotic Arm and Embedded Gripper
- This project integrates a robotic arm controlled via ROS with a TM4C microcontroller-based robotic gripper, enabling precise manipulation and task execution.
- Through coordinated control between the arm and the gripper, the system can perform operations such as object grasping, transport, and placement. The design highlights the synergy between high-level motion planning in ROS and low-level embedded control, providing a versatile platform for research in automation and intelligent manipulation.
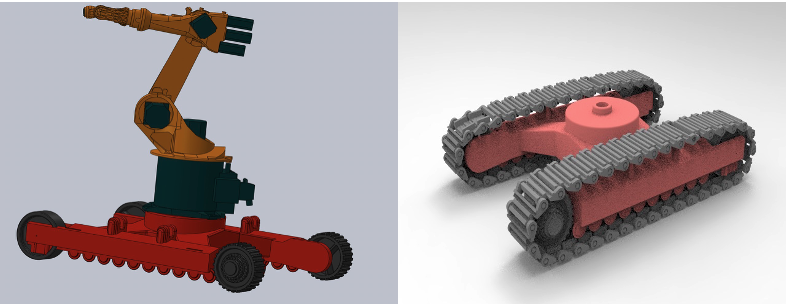
- Design of Automatic Fruit Picker for Cherry Tomatoes
- First Prize at the University Level of the National Student Competition of Innovative Mechanical Design.
- Optimized the tracked base of the harvester for easy navigation through various complex picking terrains.
- Designed the robotic arm module and developed a 4-degree-of-freedom robotic arm, making it convenient to harvest cherry tomatoes in different orientations and under various growth conditions.
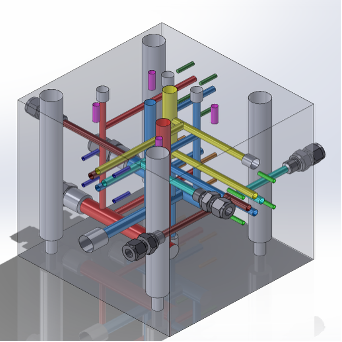
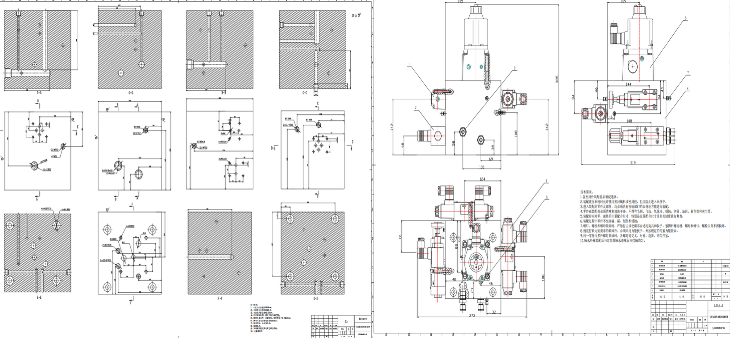
- Design of Automatic Fruit Picker for Cherry Tomatoes
- Defined design requirements, analyzed working conditions, and selected hydraulic components.
- Based on the selected hydraulic components, such as relief valves, directional control valves, flow control valves, etc., create a three-dimensional valve plate model using SolidWorks. Additionally, generated detailed two-dimensional valve plate sectional views and assembly drawings through CAD.
✏️ Journal Reviewer
- Automation in Construction
🎤 Conference Presentations
- Jul. 2026, ASABE(American Society of Agricultural and Biological Engineers)Annual Meeting, Indianapolis, IN, USA
- Apr. 2026, AI in Agriculture 2026, Raleigh, NC, USA
- Feb. 2026, The International Production & Processing Expo, Atlanta, GA, USA
- Aug. 2025, SuperZoo Annual Pet Industry Trade Show, Las Vegas, NV, USA
- Jul. 2025, Poultry Science Association Annual Meeting, Raleigh, NC, USA
- Jun. 2025, Workshop on Smart Robots for a Scalable and Resilient Future of Agriculture, College Station, TX, USA
- May. 2025, US Precision Livestock Farming, Lincoln, NE, USA
- Jan. 2025, The International Production & Processing Expo, Atlanta, GA, USA
- Aug. 2024, World Robot Conference, Beijing, China
🏆 Honors and Awards
- May 2026, TAMU Grad School Travel Award
- Sep 2025, David B Mellor ‘57 Graduate Scholarship in TAMU
- Jul 2025, Poultry Science Association Student Travel Award
- Jul 2023, Outstanding International Students Scholarship in UDM
- Dec 2022, People’s Scholarship in School Year 2021 - 2022 Term 2 in BUCT
- May 2022, People’s Scholarship in School Year 2021 - 2022 Term 1 in BUCT
- Dec 2021, People’s Scholarship in School Year 2020 - 2021 Term 2 in BUCT
- Apr 2021, Outstanding Student Leader in BUCT
📚 Reading List
A good book slows me down in the best way — it pushes me to think more carefully, challenges assumptions I didn't know I had, and opens up worlds and lives far beyond my own. Below are books I've genuinely loved and would recommend without hesitation.